***(ПРОЕКТ ВРЕМЕННО ОСТАНОВЛЕН)*** В этой серии статей будет рассмотрено создание не сложного робота.
Чтобы разработка и создание имело какой либо смысл мы поставим перед собой цель - создать робота для минисумо. Минисумо это один из классов робосумо. Цель соревнования - вытолкнуть соперника за ринг.
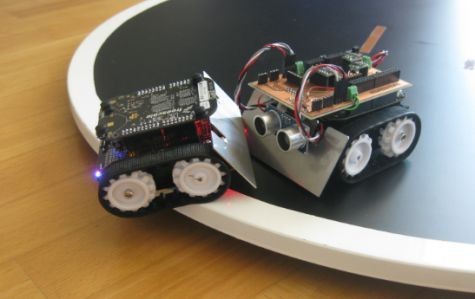
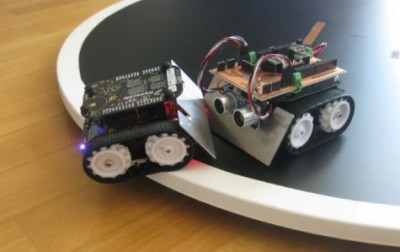
Роботы в этих соревнованиях обычно колесные платформы с минимальным набором датчиков, микроконтроллером и элементом питания (батарейка).
В процессе создания будут затронуты темы:
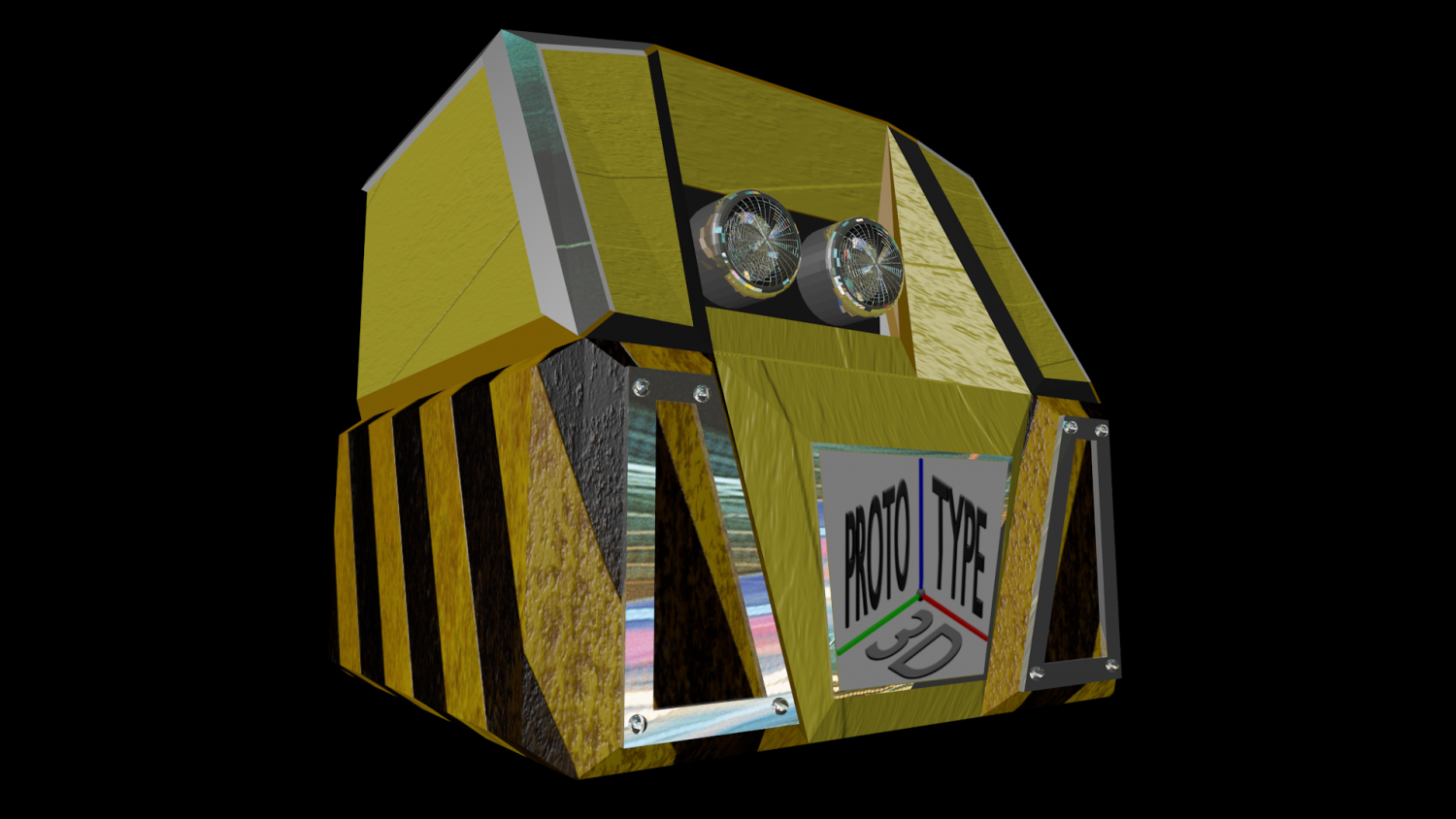
3D моделирование.
3D печать.
Электроника.
Робототехника.
Мы не будем использовать сложные формулы и вычисления. Статьи пишутся параллельно с созданием робота, поэтому некоторые элементы конструкции, возможно, будут пересмотрены и переработаны в процессе.
Как уже упоминалось минисумо это соревнование роботов, цель которого победить соперника, вытолкнув его за пределы ринга. Во время боя роботы действуют автономно, т.е. без вмешательства человека (оператора). Ринг - обычно круглое поле черного цвета по краю которого нанесена линия белого цвета.
Существует несколько видов робосумо. Самый популярный это японский класс и мини класс. Нас интересует класс мини. По регламенту соревнований этого класса робот не должен быть длиннее и шире 10 см. и тяжелее 500 гр. При этом высота не ограничивается.
Наши задачи, робот должен:
- Двигаться по рингу.
- Обнаруживать противника.
- Не выезжать за ринг.
- Быть мощным чтобы вытолкнуть противника.
Для этого нам нужно:
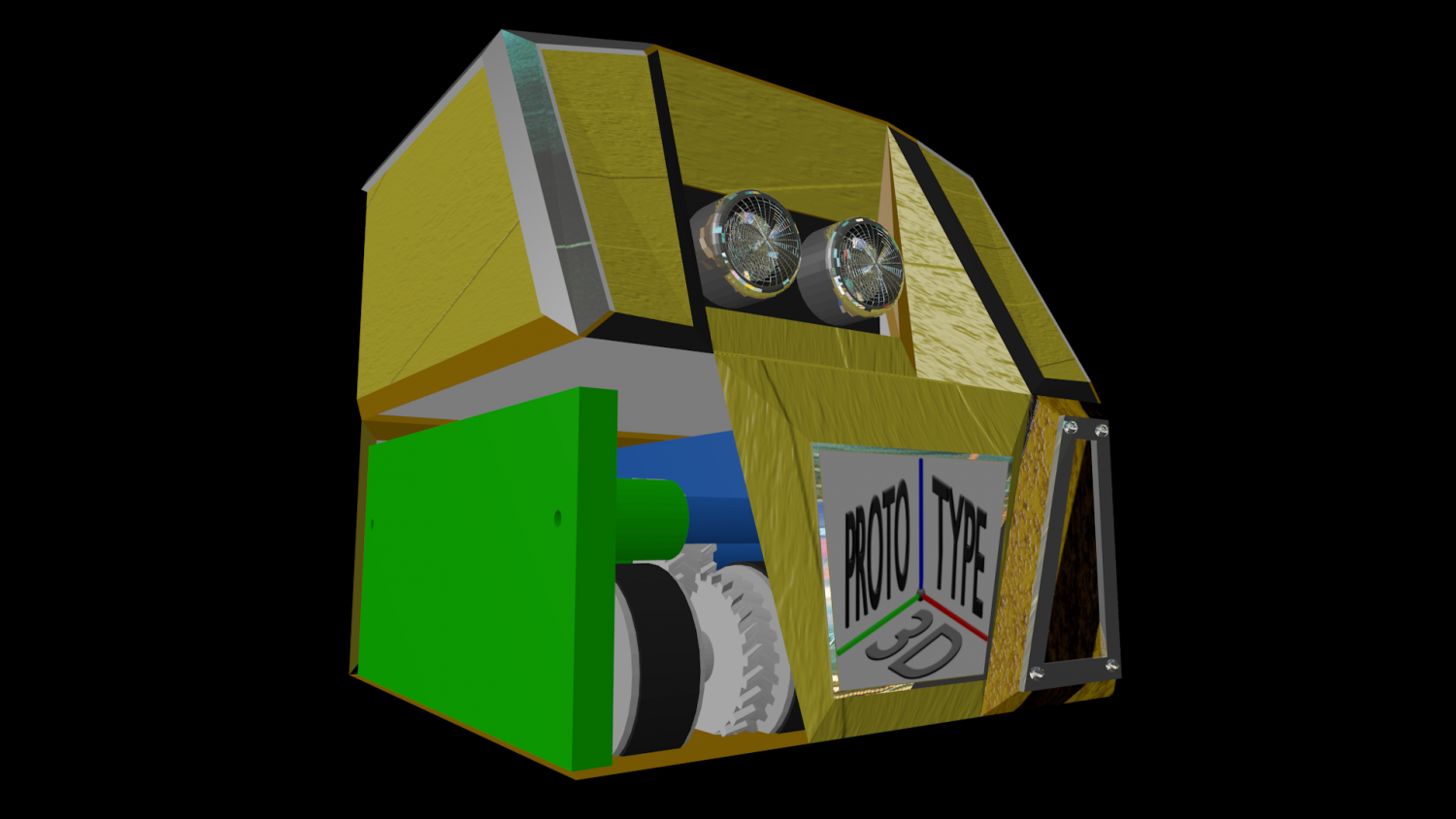
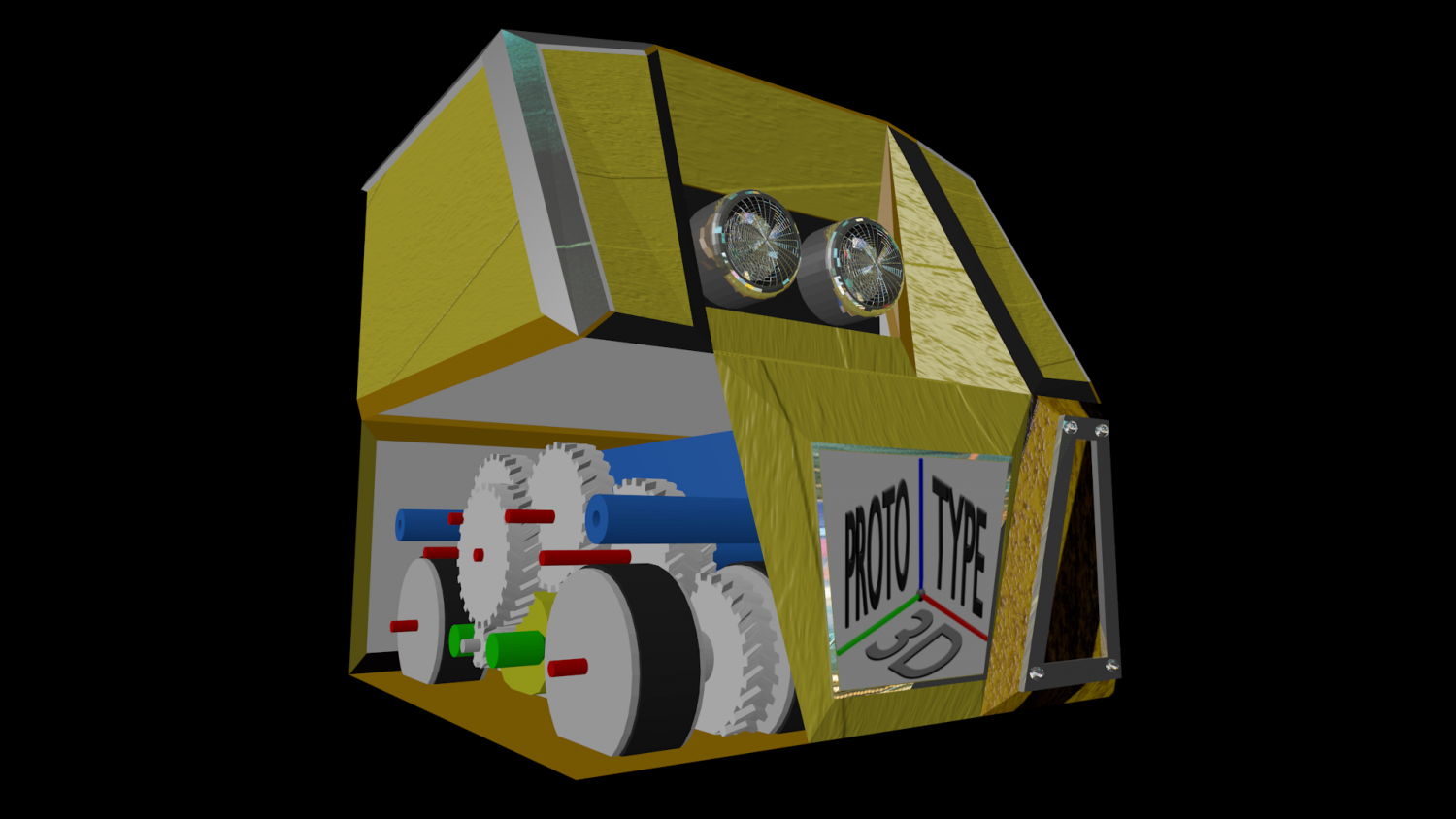
- Колесная платформа с моторами.
- Датчик препятствий (или дальномер) для обнаружения соперника.
- Датчик линии для контроля края ринга.
- Микроконтроллер для обработки данных с датчиков и управления моторами.
- Элементы питания (батарейки).
Естественно продаются и готовые роботы, и наборы для сборки, НО НАМ ЭТО НЕ ПОДХОДИТ.
В следующей части будем разрабатывать редуктор для платформы.
|